方案设计背景:
中国制造迈向自动化、集成化、智能化、绿色化的今天,为了提升产品质量、提高企业生产效率、推动社会生产力的发展,“机器换人”大势所趋。在服务国民经济转型升级、参与国际竞争的迫切需求下,工业机器人作为智能制造的主力军,处于爆发式增长的初期,机械手是最典型的机电一体智能化的重要装备 。
方案简介:
全自动液压重载机械手主要由机械连杆结构、机站分离式液压系统和运动控制系统三部分构成。主体设备的原动力,由液压系统的介质推动,经机械放大,与多维运动控制系统相匹配,实现举重若轻。满足机械手快速(2m/s)、准确(定位精度:±1 mm)、重载(额定:700kg)、高温(最高:1200℃)的搬运、码垛等动态工艺要求。
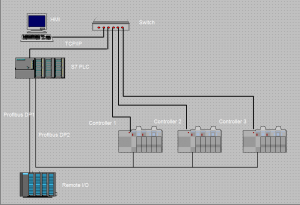
图一、 控制系统结构图
机械结构:主体机械大部件为平面连杆机构,减轻设备自重、降低驱动功率。保持工作中稳定运行、精准定位。
液压传动 :全液压驱动方式,完备的液压系统。介质流量大,满足高速运动;足够的驱动能量,满足重载驱动;辅以储能、温控等系统,抗干扰强、精准度高。
控制系统:系统架构二级控制系统和三层通讯网络,以运动控制器为核心,辅以PLC系统,自行开发的人机界面自动控制实现运动顺序控制和逻辑,且编辑便捷。
运动模式管理:机械手具有前进、后退、上升、下降、左、右移动、旋转、夹钳开、闭等多轴、多自由度运动的组合。同时,满足700kg重载下,高精度和快速性的需求。
控制模式管理:正常运行时,机械手为自动模式; 调试时,为单步模式;受到限制时,为手动模式;维护状态下,为紧急手动模式,确保保证设备和人身的安全。
流水线管理:整条流水线上,机械手间的监督与控制,采取集中管理、分散控制,各机械手既具有很强的自主性和可靠性,又具有相互间的协调性和灵活性。
物件跟踪:物件跟踪信号发给二级系统后,实现远程监控流水线上物件的位置和数量、速度和状态等信息,实现统一管理。
自编语言:开发了适用于操作使用的程序,由功能说明中提供的语法,操作者可自行设置组合不同的动作,使机械手的动作灵活多变。
客户价值:
全自动液压重载机械手在搬运、码垛领域,依照工作流程精准、灵活、高效地完成抓取、搬运、旋转、摆放等动作,实现高负重、高频率、高灵活的自动化流水作业、最大化物流管理,且可实现高温、高压、重载的特殊需求。
适用范围:
全自动液压重载机械手控制系统由我公司自主研发, 实现重载液压机械手首次国产化,填补国内空白。该系统无需人工干预,操作简便,且维护强度低。可以广泛使用在需要搬运大型重物,做复杂动作的场所,在制造业、冶金行业、物流等各部门,具有广阔的市场应用前景。
 皖 ICP 备 15014668 号
皖 ICP 备 15014668 号 皖公网安 备 34050402000600 号
皖公网安 备 34050402000600 号